For this project, I will cut open a toy and salvage a motor and a sensor (a pushbutton). Using the tools learned in ELEC10, I will re-purpose the toy and control it using a microcontroller.
For this project, I will cut open a toy and salvage a motor and a sensor (a pushbutton). Using the tools learned in ELEC10, I will re-purpose the toy and control it using a microcontroller.There is a start-up sound (Charge!). At every push of the button, a different song will play (up to three different songs: Tetris, Mission Impossible, and Mario Star Theme). When a song is playing, the mouth and eyes will move.

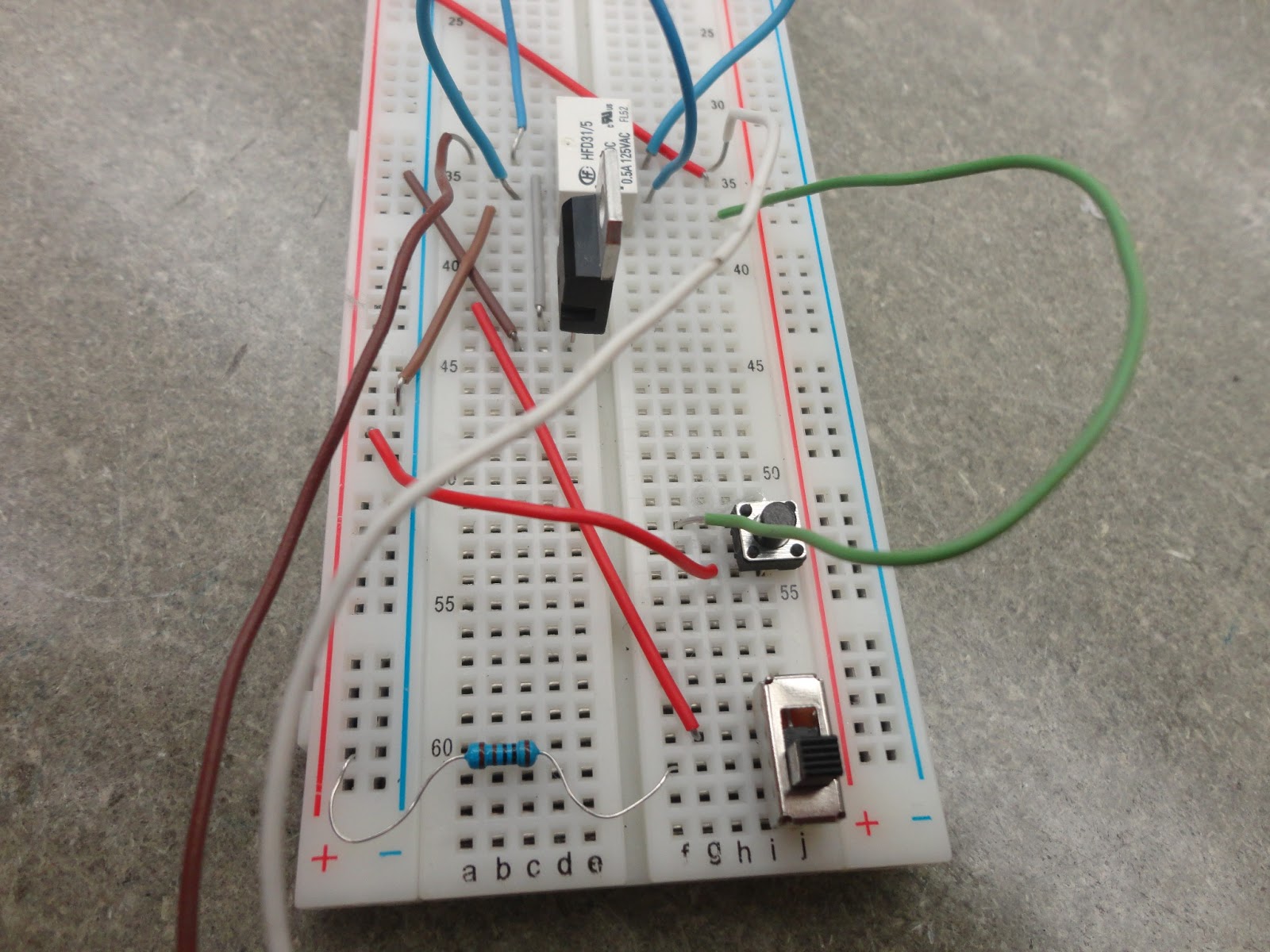
For the programming, I created a variable named "counter" to use the pushbutton switch (on the head) to increase the counter and change between modes. The motor has hardware stops preventing full rotation. Therefore I used a DPDT Relay to change the direction of the motor. On the breadboard is a yellow LED which is lit when a process is in progress. During this time, the switch will not increase the counter. A 100 Ohm resistor is used in series with the speaker. A 4.7kOhm connected to the pin and a 10kOhm resistor connected to ground is used on the switch operator. Lastly, a 2.2kOhm resistor is used for the TIP120 transistor, which amplifies the current enough to run the motor.
Below is the programming code used with the LaunchPad:
/*************************************************
* Public Constants
*************************************************/
#define NOTE_B0 31
#define NOTE_C1 33
#define NOTE_CS1 35
#define NOTE_D1 37
#define NOTE_DS1 39
#define NOTE_E1 41
#define NOTE_F1 44
#define NOTE_FS1 46
#define NOTE_G1 49
#define NOTE_GS1 52
#define NOTE_A1 55
#define NOTE_AS1 58
#define NOTE_B1 62
#define NOTE_C2 65
#define NOTE_CS2 69
#define NOTE_D2 73
#define NOTE_DS2 78
#define NOTE_E2 82
#define NOTE_F2 87
#define NOTE_FS2 93
#define NOTE_G2 98
#define NOTE_GS2 104
#define NOTE_A2 110
#define NOTE_AS2 117
#define NOTE_B2 123
#define NOTE_C3 131
#define NOTE_CS3 139
#define NOTE_D3 147
#define NOTE_DS3 156
#define NOTE_E3 165
#define NOTE_F3 175
#define NOTE_FS3 185
#define NOTE_G3 196
#define NOTE_GS3 208
#define NOTE_A3 220
#define NOTE_AS3 233
#define NOTE_B3 247
#define NOTE_C4 262
#define NOTE_CS4 277
#define NOTE_D4 294
#define NOTE_DS4 311
#define NOTE_E4 330
#define NOTE_F4 349
#define NOTE_FS4 370
#define NOTE_G4 392
#define NOTE_GS4 415
#define NOTE_A4 440
#define NOTE_AS4 466
#define NOTE_B4 494
#define NOTE_C5 523
#define NOTE_CS5 554
#define NOTE_D5 587
#define NOTE_DS5 622
#define NOTE_E5 659
#define NOTE_F5 698
#define NOTE_FS5 740
#define NOTE_G5 784
#define NOTE_GS5 831
#define NOTE_A5 880
#define NOTE_AS5 932
#define NOTE_B5 988
#define NOTE_C6 1047
#define NOTE_CS6 1109
#define NOTE_D6 1175
#define NOTE_DS6 1245
#define NOTE_E6 1319
#define NOTE_F6 1397
#define NOTE_FS6 1480
#define NOTE_G6 1568
#define NOTE_GS6 1661
#define NOTE_A6 1760
#define NOTE_AS6 1865
#define NOTE_B6 1976
#define NOTE_C7 2093
#define NOTE_CS7 2217
#define NOTE_D7 2349
#define NOTE_DS7 2489
#define NOTE_E7 2637
#define NOTE_F7 2794
#define NOTE_FS7 2960
#define NOTE_G7 3136
#define NOTE_GS7 3322
#define NOTE_A7 3520
#define NOTE_AS7 3729
#define NOTE_B7 3951
#define NOTE_C8 4186
#define NOTE_CS8 4435
#define NOTE_D8 4699
#define NOTE_DS8 4978
//Above is the library pitches.h
#define coil 3
#define motorHead 4
#define buttonPin 5
#define buttonLED 6
//pin 8 is audio
int buttonState = 0; //define the variable for mouth switch
int counter = 0;
int melody1[] =
{
NOTE_G3,NOTE_C4,NOTE_E4,NOTE_G4,NOTE_E4,NOTE_G4
}; //Notes in the melody
int noteDurations1[] =
{
8, 8, 8, 4, 8, 1
}; //Note durations: 4 = quarter note, 8 = eigth note
int melody2[] =
{
NOTE_E4,NOTE_B3,NOTE_C4,NOTE_D4,NOTE_C4,NOTE_B3,NOTE_A3,NOTE_A3,NOTE_C4,NOTE_E4,NOTE_D4,NOTE_C4,NOTE_B3,NOTE_C4,NOTE_D4,NOTE_E4,NOTE_C4,NOTE_A3,NOTE_A3
}; //Notes in the melody
int noteDurations2[] =
{
4, 8, 8, 4, 8, 8, 4, 8, 8, 4, 8, 8, 3, 8, 4, 4, 4, 4, 4
}; //Note durations: 4 = quarter note, 8 = eigth note
int melody3[] =
{
NOTE_D4,NOTE_D4,NOTE_F4,NOTE_G4,NOTE_D4,NOTE_D4,NOTE_C4,NOTE_CS4
};
int noteDurations3[] =
{
2, 2, 3, 3, 2, 2, 3, 3
}; //Note durations: 4 = quarter note, 8 = eigth note
int melody4[] =
{
NOTE_F4,NOTE_F4,NOTE_F4,NOTE_D4,NOTE_F4,0,NOTE_F4,NOTE_D4,NOTE_F4,NOTE_D4,NOTE_F4,NOTE_E4,NOTE_E4,NOTE_E4,NOTE_C4,NOTE_E4,0,NOTE_E4,NOTE_C4,NOTE_E4,NOTE_C4,NOTE_E4
};
int noteDurations4[] =
{
4, 4, 4, 8, 8, 8, 4, 8, 8, 8, 4, 4, 4, 4, 8, 8, 8, 4, 8, 8, 8, 4
}; //Note durations: 4 = quarter note, 8 = eigth note
void setup ()
{
Serial.begin(9600);
pinMode(coil, OUTPUT); //initialize the coil as an output
pinMode(motorHead, OUTPUT); //initialize the motorHead as an output
digitalWrite(motorHead, LOW); //turn the Head Motor OFF
pinMode(buttonPin, INPUT_PULLUP); //initialize pin 5 as input
pinMode(buttonLED, OUTPUT); //initialize pin 6 as an output
delay(500);
for (int thisNote = 0; thisNote < 8; thisNote++) //Plays "Charge"!
{
int noteDuration = 1000/noteDurations1[thisNote]; //calculate the note duration
tone (8, melody1[thisNote], noteDuration); //Play the note
delay(noteDuration);
}
digitalWrite(motorHead, HIGH); //turn on the motorHead
digitalWrite(coil, HIGH); //turn on the coil
delay(3000); //attempt to center the motor between the two hardware stops
digitalWrite(motorHead, LOW); //turn off the motorHead
digitalWrite(coil, LOW); //turn off the coil
}
void loop ()
{
Serial.println(counter);
buttonState = digitalRead(buttonPin); //read the state of the pushbutton value
if(buttonState == HIGH)
{
digitalWrite(buttonLED, HIGH); //turn LED ON
counter = counter + 1; //increase the counter
delay(1000); //pressing button only increases counter once
}
if(buttonState == LOW)
{
digitalWrite(buttonLED, LOW); //turn the LED OFF
counter = counter % 6; //set counter to the reaminder, range 0-3
}
///////////////////////////////////////////////////////////////
if(counter == 0)//Counter = 1, do nothing
{
digitalWrite(motorHead, LOW);
}
//Counter = 2, first mode, tetris
else if(counter == 1)
{
digitalWrite(motorHead, HIGH); //turn the Head Motor ON
for(int i = 0; i < 1; i++) //repeeat the song 'i' times
{
for(int thisNote = 0; thisNote < 19; thisNote++)
{
if(thisNote < 10) //For half the song, power the motor one direction, else power opposite direction
{
digitalWrite(coil, HIGH);
}
else
{
digitalWrite(coil, LOW);
}
int noteDuration = 1500/noteDurations2[thisNote]; //calculate the note duration
tone (8, melody2[thisNote], noteDuration); //Play the note
delay(noteDuration);
}
}
digitalWrite(motorHead, LOW); //turn the Head Motor ON
counter = counter + 1; //Increase the counter to a no-action state
}
else if(counter == 2)//first mode complete, do nothing
{
digitalWrite(motorHead, LOW);
}
//Counter = 3, second mode, mission imposible
else if(counter == 3)
{
digitalWrite(motorHead, HIGH); //turn the Head Motor OFF
for (int j = 0; j < 2; j++) //repeat the song 'j' times
{
for (int thisNote = 0; thisNote < 16; thisNote++)
{
if(thisNote < 8) //For half the song, power the motor one direction, else power opposite direction
{
digitalWrite(coil, HIGH);
}
else
{
digitalWrite(coil, LOW);
}
int noteDuration = 1000/noteDurations3[thisNote]; //calculate the note duration
tone (8, melody3[thisNote], noteDuration); //Play the note
delay(noteDuration);
}
}
counter = counter + 1;//Increase the counter to a no-action state
}
else if(counter == 4)//second mode complete, do nothing
{
digitalWrite(motorHead, LOW);
}
//Counter = 4, third mode, mario star
else if(counter == 5)
{
digitalWrite(motorHead, HIGH); //turn the Head Motor OFF
for (int k = 0; k < 4; k++) //repeat the song 'k' times
{
for (int thisNote = 0; thisNote < 22; thisNote++)
{
if(thisNote < 11) //For half the song, power the motor one direction, else power opposite direction
{
digitalWrite(coil, HIGH);
}
else
{
digitalWrite(coil, LOW);
}
int noteDuration = 800/noteDurations4[thisNote]; //calculate the note duration
tone (8, melody4[thisNote], noteDuration); //Play the note
delay(noteDuration);
}
}
counter = counter + 1; //Increase the counter to a no-action state
}
}